Status:
Attic - work on this topic has concluded
(get in touch to discuss a follow-up topic or similar topics)
Simulative Performance Evaluation of a Provably Collision Free Approach for Managing Autonomous Cars on Urban Intersections
PA: Research Project (INF-PM-FPA / INF-PM-FPG / INF-25-MA-FP) or
BA: Bachelor Thesis (or Studienarbeit / Großer Beleg)
The concept of cooperative driving, that is, allowing cars and trucks to wirelessly coordinate their actions, has massive potential to improve future urban traffic. One of the key research questions in this area is how to optimize traffic flow over intersections. In recent years, big strides have been made in the domains of adapting platooning systems to urban intersection traffic and intersection control systems to cooperative driving. More recently, in-depth studies have surfaced that tackle the problem of coordinating traffic on intersections from the perspective of theoretical computer science. In this context, scientists were able to prove that, under somewhat ideal assumptions, the safety of abstract protocols can even be proven. An open question is to what degree safety guarantees of such protocols still hold when certain effects exhibited by realistic vehicle movement and/or wireless data exchange are introduced.
Goals of the thesis
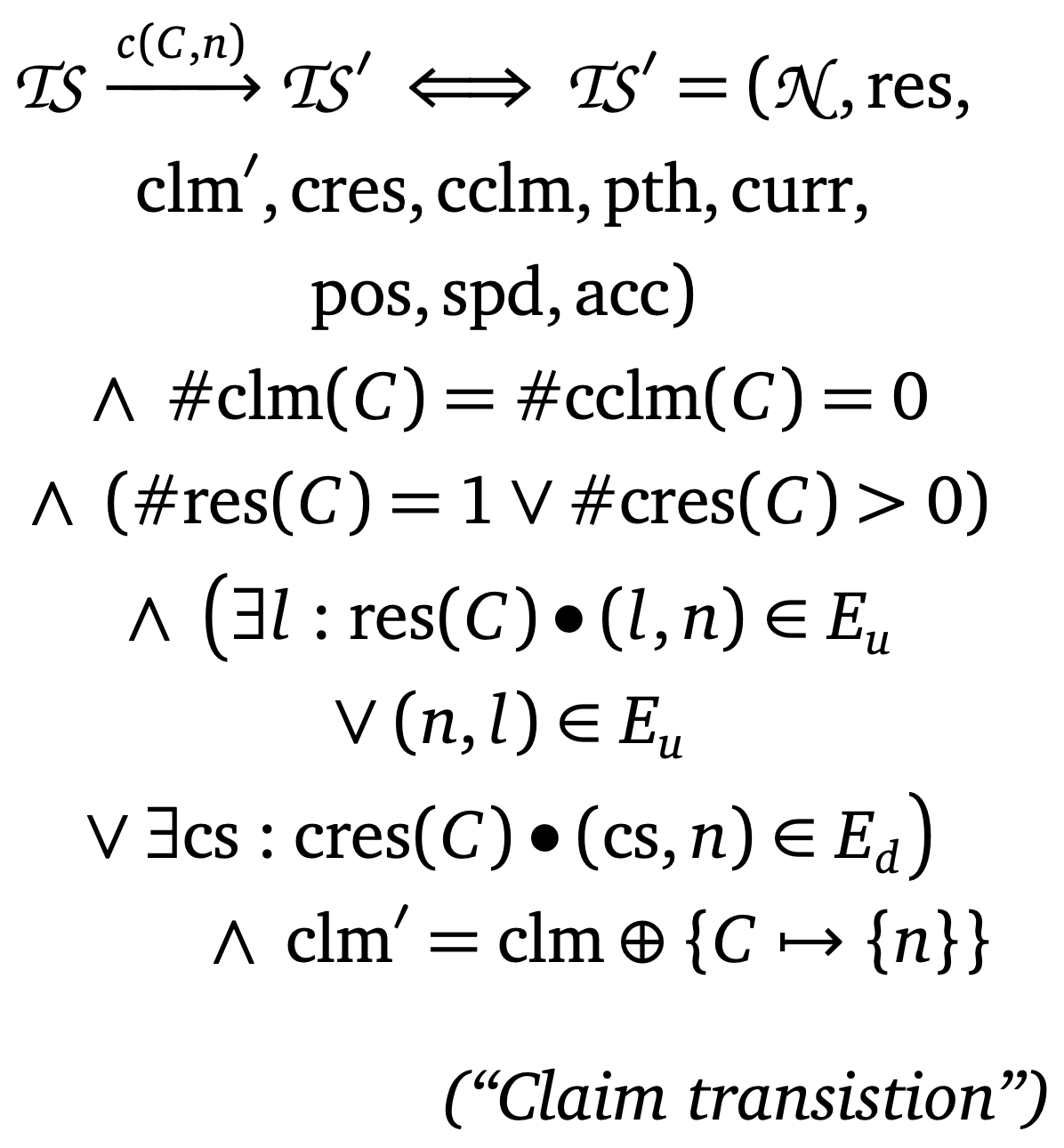
The thesis will begin with an implementation of an intersection control approach from theoretical computer science (more specifically the one by Schwammberger [1]) in Veins (http://veins.car2x.org), the open source vehicular network simulation framework. Veins allows the simulation to be flexibly parameterized – from simulating with maximum degree of realism to highly ideal models of, e.g., wireless channel and road traffic. At the same time, Veins allows a wide variety of performance metrics to be observed, e.g., smoothness of traffic and minimum vehicle gap. Building on this, the thesis will continue by conducting simulations with varying degrees of realism and observing a wide range of metrics. The thesis will conclude with an observation of the impact of level of abstraction and choice of model on the overall performance of the system.
Keywords
Theoretical Computer Science, C++, Network Simulation
Literature
[1] M. Schwammberger, “An abstract model for proving safety of autonomous urban traffic,” Elsevier Theoretical Computer Science, vol. 744, pp. 143–169, Oct. 2018. DOI: 10.1016/j.tcs.2018.05.028.