Closed-Loop Control in Networked Control Systems 2023w [CLC 2023w]
(2/2/0) INF-VERT1, INF-B-520, Winter 2023/2024
- ⏰ Time, Date, and Location: Tuesdays, 2. DS (09:20), HSZ 108 (lecture) and Tuesdays, 3. DS (11:10), APB E069 (labs)
- 🟢 Start: 1st week of teaching period as a hybrid event: both physically and as a web meeting but only in the first week. At this appointment the course participants will choose between either physical meetings or virtual meetings for the rest of the semester
- 📦 Format: 🏛/🎙️ both physical and web meeting, 💬 chat
- 👋 Web meeting links: see section “Web Meeting Links”
- 🧰 Prerequisites: see section “Prerequisites”
- 💬 Questions? Comments? Join the discussion in our Matrix Room #nsm-course-clc:tu-dresden.de (reachable from the TU Dresden Matrix server)
Contents
A significant part of all software is developed for technical embedded applications, e.g. for cars, planes, production plants, machine tools, robots etc. These applications differ from desktop software in that way that the software uses also sensor signals as inputs and sends control signals to actuators (e.g. motors or valves) as outputs. These outputs have an influence on the sensor signals again, therefore we speak of “closed-loop control”. Closed-loop control requires special algorithms (controllers) and design methods to avoid damages or injuries due to instability.
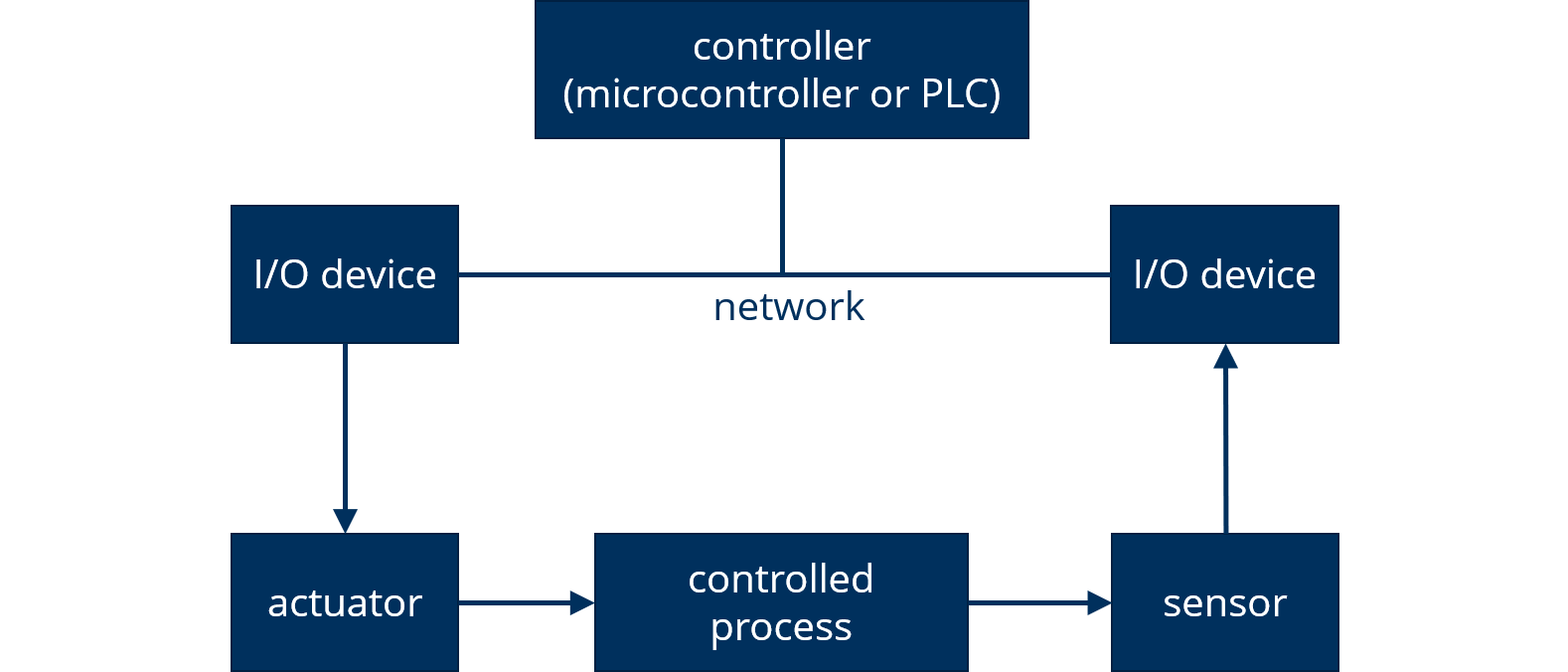
The lecture builds on the knowledge from “Systemorientierte Informatik” and concentrates on state-of-the-art controllers and practical aspects like the realization of controllers in industry-standard PLCs and microcontrollers. One further main focus lies on network issues, because nearly all modern control loops include network transmissions for sensor or actuator signals. Transmission delays or packet losses may have critical consequences for the control loop stability. Also related topics like stability, robustness, adaptive control, and safety will be touched.
In the labs, the participants solve control design tasks using simulation tools like Matlab/Simulink (the dominant tool for engineers both in industrial practice and science) and Plexe (a tool specialized on control loop tests for cooperative vehicles). These excercises shall give the students a practical feeling for typical problems and solutions in controller design due to own hands-on experience.
In the practical part, the participants will implement own controllers on a microcontroller (or PLC, if preferred), as close as possible to industrial practice.
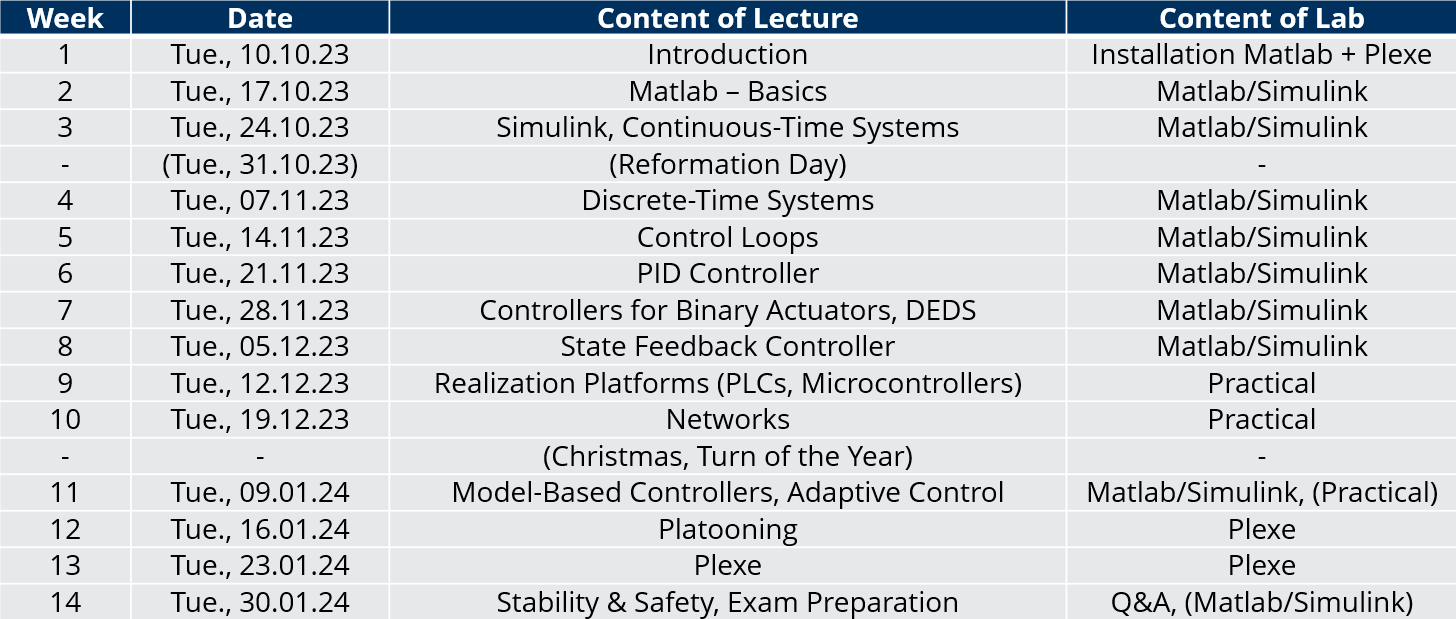
Preliminary Timeline
Prerequisites
There are no formal prerequisites for joining. You should have taken the course “Systemorientierte Informatik” or a similar course focused on systems theory and control fundamentals. These basics are only roughly repeated at the beginning of the course.
Learning Outcome
Students will be able to design and implement controllers for usual applications in technical domains. They know the critical aspects of control loops and methods to deal with them. Further, they are able to discuss with control engineers on a professional level if they develop industry-related software (e.g. for process monitoring or machine learning applications).
General Information / Methods
This course will be held in English (German, if universally preferred) and all the course material is available in English. Course material will be distributed/collected via OPAL.
All slides will be presented in a weekly on-campus meeting or interactive live stream for synchronous learning. The streaming platform is the TU Dresden BigBlueButton instance, with Zoom as a fall-back. Times and dates as well as links will be published here.
Questions? Comments? Join the discussion in our Matrix Room #nsm-course-clc:tu-dresden.de (reachable from the TU Dresden Matrix server) or add a post to our OPAL forum!
Grading
Oral examination (by appointment).
Option of written exam if 32 participants or more where covered by degree program regulations.
If you want to get a grade, please pre-register the exam with us in the first two weeks of lecture. This is in addition to the regular exam registration you will need to do later in the semester. See the organizational slide deck for details.
Instructors
Web Meeting Links
The class will be run both physically and as a web meeting in the first week. For the location on campus, see the section “In a nutshell” above. For the link to the web meeting, see below. We will begin by discussing how to continue the course (physical or virtual).
In case of technical difficulties, please check the Matrix room.
Slides
- see OPAL
Literature
The following literature covers parts of the course and is available in SLUB Dresden:
- Dimitrios Hristu-Varsakelis and William S. Levine: Handbook of networked and embedded control systems. Birkhäuser, Boston, 2005. Available in SLUB.
- Jing Sun: Control Engineering: Fundamentals. De Gruyter, Berlin, 2018. Available in SLUB.
- William S. Levine (editor): Control system fundamentals. CRC Press, Boca Raton, 2000. Available in SLUB.
- Ashish Tewari: Modern control design: With MATLAB and SIMULINK. Wiley, Chichester, 2002. Available in SLUB.
- Antonio Visioli: Practical PID Control. Springer, London, 2006. Available in SLUB.
German literature:
- Hans Kaufmann, Eckehard Kalhöfer, Alexander Pflug, Jürgen Baur, and Dietmar Schmid: Automatisierungstechnik: Grundlagen, Komponenten und Systeme für die Industrie 4.0. Europa-Lehrmittel, Haan-Gruiten, 14th edition, 2021.
- Gerhard Lämmlin, Otto Spielvogel, Thomas Klatt, Walter Eichler, Hans Hebel, Ulrich Winter, Eckhard Thiele, and Alexander Scheib: Fachkunde Mechatronik. Europa-Lehrmittel, Haan-Gruiten, 6nd edition, 2019. Available in SLUB.
- Holger Lutz and Wolfgang Wendt: Taschenbuch der Regelungstechnik: mit MATLAB und Simulink., Europa-Lehrmittel, Haan-Gruiten, 12th edition, 2021. Available in SLUB.
- Jan Lunze: Regelungstechnik 1: Systemtheoretische Grundlagen, Analyse und Entwurf einschleifiger Regelungen. Springer, Berlin, 9th edition, 2013. Available in SLUB.
- Jan Lunze: Regelungstechnik 2: Mehrgrößensysteme, digitale Regelung. Springer, Berlin, 9th edition, 2016. Available in SLUB.